Python-based time-series software (PYSAR)
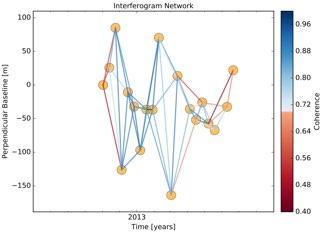
The InSAR technique relies on the inversion of a network of interferograms for the phase history with time for which we (Heresh Fattahi and Yunjun Zhang) have developed the PySAR software. Software features include the correction for topographic residuals in the time domain (Fattahi & Amelung, 2013), phase-unwrap error correction, multiple approaches for the correction for atmospheric delays, for masking and for network selection, and saving data in Unavco format. PySAR reads data stacks processed with ICSE, GAMMA and ROIPAC. It is freely available from Github. The approach is described by Fattahi & Amelung (2016) and a dedicated paper is being prepared for Computers & Geosciences.
InSAR bias due to systematic and stochastic atmospheric delays
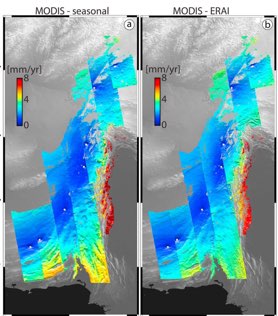
InSAR measurements are most sensitive to temporal and spatial variations in tropospheric wet delay. In order to understand how well these variations are represented, and can be corrected for, by Global Atmospheric Models (GAM) we have used MODIS measurements of precipitable water vapor and removed the stratified delay using GAMs. We found that the scatter of the residuals is of similar magnitude as the scatter of InSAR time-series data, suggesting that a combination of MODIS and GAMs can serve to estimate the uncertainties of InSAR measurements due stochastic tropospheric variations. See our paper.
Orbital errors in InSAR data
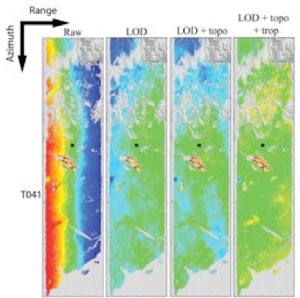
Orbital errors are thought to be a major limitation for resolving long-wavelength (> 50 km) deformation with InSAR. Heresh Fattahi and Falk Amelung went back to the basics and investigated how InSAR velocity fields depend on orbital errors. Surprisingly, they found that the effect is very small. Contributions from orbital errors generally cancel each other out. Residual velocity ramps have standard deviations of less than 1 mm/yr across a SAR frame. For the Sentinel-1 satellites the contribution of orbital errors is as low as 0.15 mm/yr across the swath. See our paper.
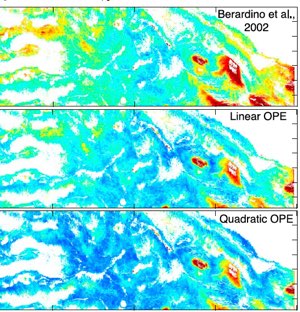
Topographic Residual Correction
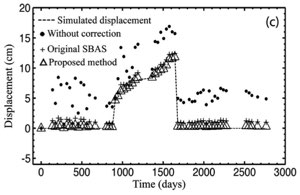
In the conventional Small Baseline (SB) method DEM errors are corrected for through a network approach in the interferogram domain. Heresh Fattahi shows that DEM errors are proportional to the perpendicular baseline history of the set of SAR images used, and are most efficiently corrected in the time domain after the time-series inversion. This method corrects also for bias introduced by geometrical approxumations. See Heresh’s paper.
GPS and InSAR Integration
The long-wavelength uncertainty of velocity fields can be reduced by integrating the InSAR data with GPS. Noel Gourmelen, Falk Amelung and Riccardo Lanari propose to do this in the time-domain after time-series inversion but before estimating velocities. Several other post-processing steps are more efficiently applied in the time-domain, but this requires reliable phase-unwrapping. See Noel’s JGR paper for a description of the method.